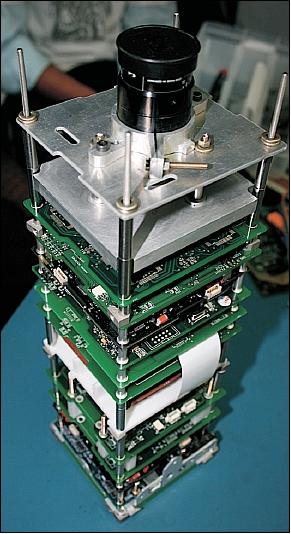

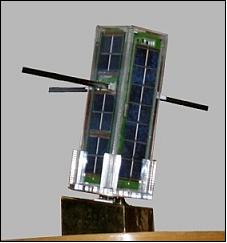
Jugnu (Hindi: जुगनू) è un dimostratore di tecnologico indiano ed un satellite CubeSat telerilevato che è stato gestito dall'Istituto indiano di tecnologia Kanpur. Costruito sotto la guida del Dr. N. S. Vyas, è un nanosatellite che verrà utilizzato per fornire dati per il monitoraggio dell'agricoltura e delle catastrofi. È un veicolo spaziale di 3 chilogrammi (6,6 libbre), che misura 34 centimetri (13 pollici) di lunghezza per 10 centimetri (3,9 pollici) in altezza e larghezza. Il suo programma di sviluppo costa circa 25 milioni di rupie. E' progettato per una vita di almeno un anno. Jugnu è stato lanciato il 12 ottobre 2011 in orbita terrestre bassa da un vettore PSLV-CA C18.
Imaging.
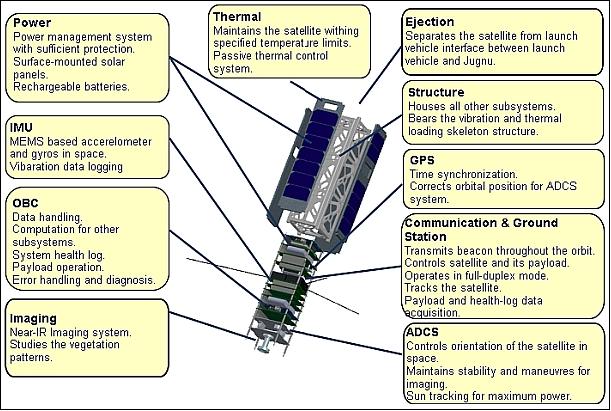
Questo sottosistema cattura delle immagini IR mirate della superficie terrestre che aiutano a identificare come utilizzare un'area. Il sottosistema è costituito da una "Near IR camera", una memoria esterna e un On-Board Computer (OBC) che funge da interfaccia tra i due, oltre a svolgere la compressione/elaborazione dell'immagine. La fotocamera acquisisce un'immagine di 640x480 pixel che viene poi trasferita ad una memoria esterna dall'OBC. L'immagine viene quindi elaborata (se richiesta) e trasmessa alla stazione di terra. Si prevede una risoluzione complessiva di circa 161 X 161 metri quadrati per pixel della superficie terrestre. L'area di visione totale, sulla superficie terrestre, dovrebbe essere di circa 103 X 77 chilometri quadrati.
GPS.
Il carico utile GPS di Jugnu aiuta a sincronizzare l'ora dell'OBC con i dati di temporizzazione recuperati dal modulo GPS. I parametri orbitali dal GPS vengono inseriti nel sistema ADCS, che assiste nel posizionamento satellitare di volta in volta.
ADCS.
Il sistema di determinazione e controllo dell'assetto (ADCS) orienta il satellite in modo tale che la massima energia solare sia incidente sui suoi pannelli solari. Durante l'imaging il satellite deve puntare in una posizione fissa della Terra per catturare immagini di alta qualità, cosa che viene compiuta dall'ADCS. Il controllo da parte dell'ADCS è necessario per assicurare che le antenne (che hanno angoli stretti) siano puntate correttamente verso la Terra. Le forze gravitazionali dal Sole, dalla Luna e dai pianeti, la pressione solare che agisce sulle antenne e sul corpo del satellite ed i campi magnetici creano disturbi rotazionali. Poiché il satellite si muove attorno al centro della Terra nella sua orbita, le forze sopra descritte variano ciclicamente. Questo tende a deviare il satellite, problema che viene smorzato usando l'ADCS.
Termico.
Il sottosistema di controllo termico (TCS) mantiene la temperatura entro il limite specificato da 298 K a 323 K. Assicura che non si verifichino gradienti termici elevati e stress termici eccessivi attraverso le strutture. Il sottosistema di controllo termico di JUGNU è essenzialmente passivo grazie a fogli di MLI, OSR e rivestimenti superficiali come componenti chiave. Dispone inoltre di sensori basati su IC e termocoppie per fornire feedback e mantenere la salute del IC e delle fotocamera sensibili. Il calore prodotto nella struttura viene distribuito rapidamente al sistema per evitare che si rovini.
Altri sottosistemi.
Il sistema IMU (Inertial Measurement Unit) è utilizzato per misurare le vibrazioni nel satellite e la sua velocità angolare, viene utilizzato per testare le prestazioni dei sensori basati su MEMS e per fornire dati di posizione e orientamento all'OBC. Il sottosistema di espulsione è l'interfaccia tra il satellite e il razzo, e' una struttura simile ad una scatola che è imbullonata sul ponte della parte superiore del naso del razzo, con il satellite posizionato all'interno di quella scatola. Si separa dal razzo con una piccola velocità iniziale impartita da una molla posta alla base del sistema di espulsione. È un sistema di espulsione indiano che può essere utilizzato per lanci futuri.
Obiettivi e scopi della missione.
L'obiettivo principale della missione era realizzare un nanosatellite presso lo IIT Kanpur che potesse essere utilizzato come Micro Imaging Systems, come ricevitore GPS, per localizzare la posizione del satellite nell'orbita, e per l'IMU (Inertial Measurement Unit) basata su MEMS.
Gli obiettivi primari della missione erano:
- Avviare attività di ricerca verso lo sviluppo del nanosatellite basato su MEMS.
- Per testare nuove soluzioni economiche per future missioni spaziali redditizie.
- Impostare il percorso per le future missioni e studiare tali concetti di convalida per possibili progetti.
I suoi obiettivi a lungo termine erano:
- Sviluppare competenze nella progettazione, fabbricazione e utilizzo di micro satelliti.
- Completare gli sforzi di sviluppo dei requisiti delle applicazioni satellitari dell'India attraverso lo sviluppo e la convalida della tecnologia a livello di micro-satelliti.
- Sviluppo e formazione delle risorse umane.
- Rafforzare le attività nelle applicazioni basate su sensori MEMS.
Fonte: ed altri riferimenti: https://en.wikipedia.org
Altri dati su questo satellite: https://directory.eoportal.org
Traduzione effettuata dal Webmaster del portale Ogigia aiutandosi con le risorse di Google.